

How to Cite | Publication History | PlumX Article Matrix
Smirnov A. S, Tolstaya A. M, Tukmacheva Yu. A, Grigoryan A. A
National Research Nuclear University “MEPhI” (Moscow Engineering Physics Institute), Kashirskoeshosse 31, Moscow, Russian Federation.
DOI : http://dx.doi.org/10.13005/bbra/2299

ABSTRACT: Improving specifications of wireless endoscopic capsules is a topical issue nowadays. This article is devoted to the illumination system of the wireless endoscopic capsule.The authors describe the advantages of using colored led flashes for illumination of the gastrointestinal tract when fixing images. It is also described how to achieve uniform illumination of the digestive tract due to the change of the mutual arrangement of the optical axes of the light-emitting elements and the matrix.The described solution will improve the quality of images captured by the capsule that will positively affect the process of automated recognition of pathologies of the digestive tract.
KEYWORDS: endoscopic capsule; LEDs; illumination; optical axis of a matrix; colored flash; color filters
Download this article as:| Copy the following to cite this article: Smirnov A. S, Tolstaya A. M, Tukmacheva Yu. A, Grigoryan A. A. Suggestions for Improvement of the Illumination System and the use of Colored Flashes in Endoscopic Capsule. Biosci Biotech Res Asia 2016;13(3). |
| Copy the following to cite this URL: Smirnov A. S, Tolstaya A. M, Tukmacheva Yu. A, Grigoryan A. A. Suggestions for Improvement of the Illumination System and the use of Colored Flashes in Endoscopic Capsule. Biosci Biotech Res Asia 2016;13(3). Available from: https://www.biotech-asia.org/?p=15476 |
Introduction
Wireless capsule endoscopy is a modern method of non-invasive examinations of a human digestive tract by a miniature capsule with built-in camera. The camera captures images of the gastrointestinal tract (GIT) and sends them to the reader, which is then connected to a PC doctor for further processing of the received images. [1-4].
A wireless endoscopic capsule can be outlined as shown in Figure 1 [5].
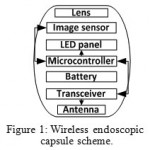 |
Figure 1: Wireless endoscopic capsule scheme |
The illumination system is a critical component of an endoscopic capsule, because the better the quality of recorded images, the more accurate abnormalities and morphological changes in the digestive tract can be detected [6]. To this end, the endoscopic capsule is equipped with a LED panel that provides illumination of the GITfor image sensor to be able to capture images.
The issue of improving optical component of the endoscopic capsule to capture images of the digestive tract was the subject of many scientific papers. For instance, Cerveri et al. study the feasibility of a novel miniaturized optical system for endoscopy [7]. Perspective shape from shading for wide-FOV near-lighting endoscopes is discussed in [8]. Lu et al. tell about a compact light-emitting diode lighting ring for video-assisted thoracic surgery [9].
Despite the successes achieved, the existing methods of image improvement have their drawbacks, for example, high-energy consumption, high cost of the system, etc.
This article will address the issues of improving the quality of an image of the digestive tract using colored led flashes and achieving uniform illumination of the digestive tract.
Methodology
Let us consider some optical specifications of the endoscopic capsules PillCamSB 2, EndoCapsule and MiroCam [10], [11] (Table 1).
Table 1: Endoscopic capsules` specifications.
| PillCam SB 2,
GivenImaging |
EndoCapsule, Olympus | MiroCam, IntroMedic | |
| Angle, degrees | 156 | 145 | 170 |
| Number of LEDs | 6 | 6 | 6 |
| Shooting speed, fps | 24 | 2 | 3 |
The camera of the endoscopic capsule has a wide angle of view, which often varies, from 120 to 180 degrees [10].
To obtain video images of the mucosa of the GIT the endoscopic capsule comprises a photosensitive matrix (in our case it will be the CMOS (complementary metal-oxide-semiconductor) matrix OV7690 [12]), on which a system of lens “put on”. As an example, let us consider an optical system of a wireless endoscopic capsule”Landish”, which is shown in Figure 2.
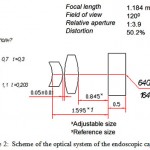 |
Figure 2: Scheme of the optical system of the endoscopic capsule |
Table 2: The main technical characteristics of the photosensitive matrix
| Feature | Value |
| Thesizeof 1 pixel | 2.5×2.5mkm |
| Photosensitivearea | 1640х1220mkm |
| Casesize | 6х6mm |
| Sensitivity | 1800 mV/Lx*sec |
| Thematrixofpixels | 640х480 |
Today different types of illumination are widely used in the gastro – and colonoscopy studies [10, 13-16]. Typically, the white light is used for illumination. However, for example, to detect bleeding and research vessels an endoscope equipped with a red filter which is governed by a gastroenterologist is used. The use of a filter allows to select visually the image area of bleeding because blood reflects red light, issued by the color filter. [17]
Similarly, in the study of blood vessels of the GIT on the subject of varicose a blue filter is applied; in this case, veins reflecting blue light are clearly and brightly visible in the image, while the rest area is darkened.
This technique is often used when conducting gastro – and colonoscopy by traditional methods, however, is difficult to implement for capsule endoscopy due to the design features of the capsules: the use of mechanically exchangeable filters is problematic because of the small size of capsules and hard limits on energy supply.
However, endoscopic capsule can be compatible with the advantages of observation in different light ranges. It is suggested to use colored LEDs to obtain the desired light wavelengths. Since the capsule is an autonomous device, a human-controlled change of light does not seem rational. Instead, it is proposed to use the pattern of flashes, for example – white-red-yellow-blue [18].
To make the images contain as detailed information for diagnosis as possible, endoscopic capsule is proposed to use light-emitting diodes with 16-bit color encoding, which are activated when the camera captures an image [5].
Change of colors in the capsule occurs in cycles that gives better results after automatic processing of images in comparison to the conventional lighting. This keeps a reasonable number of images shot in standard white flash, and though provides specific information with flashes of red, yellow and blue colors.
The LEDs of the same color are arranged in pairs, which provides a uniform light distribution in the digestive tract. The camera captures images of the GIT cyclically in white, red, yellow and blue light. It should be noted that a greater number of diodes can be used (for example, 12). Multi-color diodes can also be used. [18]
For a uniform distribution of light special mirror-reflectors may be used in combination with diodes. Note that the colored LEDs can significantly reduce the expenditure of the capsule battery.
A similar function (getting an image of the GIT in a certain color) can be implementedby software, for example, highlighting only the blue channel pixels. However, because of the mutual illumination of neighboring pixels software processing of the image will not give accurate results. In addition, ifa single color isselected by software, the brightness of the image goes down three times, which negatively affects the process of automatic recognition of abnormalities and morphological changes in the GIT.
As noted above, the main purpose of the LED illuminator in an endoscopic capsule is to ensure uniform illumination of the GIT area, where the image which is taken. The matrix for image capturing of a wireless capsule has its optical axis, as well as light emitting elements, and sight radius. The optical axis of the matrix goes through the center of the field of observation, which is also the center of the endoscopic capsule.
If a capsule has a small number of LEDs (for example, four), the central axis of which are parallel to the optical axis of the matrix, the situation occurs (Figure 3), when the illumination of various parts of the GIT are uneven.
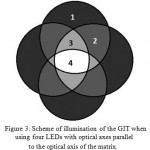 |
Figure 3: Scheme of illumination of the GIT when using four LEDs with optical axes parallel to the optical axis of the matrix. |
In Figure 3:4 – the maximum, four-fold illumination of the digestive tract (this area gets light from the four diodes); 3 – three-fold illumination; 2 – double illumination; 1 – single illumination.
Thus, there are four zones, the illumination of which differs n times from each other. Therefore, if the power of lighting of the LEDs is increased to obtain the desired brightness in the area other than the central, the central area becomes brighter than necessary. In addition, it leads to increase of power consumption of the endoscopic capsule.
Due to the different illumination of the areas, there are difficulties with the automated image analysis: some areas are overexposed, while the others are dark; it has a significant impact on the effective functioning of the software for recognition of abnormalities and morphological changes of the digestive tract [10].
In the patent [19] several constructive ways of dealing with the problem of non-uniform illumination of the gastrointestinal tract are described.
The following solutions were considered.
Increasing the number of LEDs.
In order to smooth luminance of the image, the number of LEDs in endoscopic capsule can be increased, for example, twice. This will make transitions from one lighting zone to another smoother, but will not solve the problem of over lighteningthe central zone of the image.
Here is the calculation of the optimal number of LEDs based on the light sensitivity of the matrix in question (OV7690). The matrix sensitivity is 1800 mV*Lx/sec. Light intensity of the white SMD LED, which consumes a current of 20 mA, is about 300 MCD. Thus, based on the ratio between the intensity of light in Lux, and the light intensity in candelas, the following is found:
E = I / (d2), (1)
where E is the luminance of a surface,
I is light intensity,
d is the distance to the light source.
It is necessary to take into consideration that the matrix gets reflected light from LEDs, which fades upon reflection from the mucosa. The reflection coefficient from the mucosa K is in the range of 10-55% [20]. Thus, the illumination created by the intersection of the light fluxes of n LEDs and recorded by the camera, is described by the formula
E = n*I * K / (4*d2), (2)
because the distance from diodes to the mucosal surface and from the mucosal surface to the sensor matrix is almost the same and is 2*d (d in this case is the distance from the surface of the matrix to the surface of mucosa).
Let us assess the multiplier of illumination in an extreme case of the maximum distance (approximately 180 mm – the distance from the bottom of his stomach to the lower pole of it) and the weakest reflectivity of the surface (10%).
I * K / (4*d2) (3)
The multiplier in this case takes the value of 0.92 Lux. Now let us estimate the potential created by a given luminance on the photosensitive cell of the matrix:
V = 1.8 * n * 0.92 * 1/fps, (4)
where fps is the number of images per second.
Considering fps = 30 (standard mode of the matrix, used even in the case of only 2 images per second transfer due to the Rolling Shutter effect [21]), we get:
V = n * 0.055 (5)
The resulting potential is measured in volts. Thus, the potential is 0.01 from the number of LEDs covering the most remote area.
Since the reference voltage of an analog-to-digital converter of the sensor matrix is 3.0 V, not less than 0.3 V is required to ensure picture brightness making 0.1 from the maximum.
The minimum number of LEDs that provide this condition, is equal to 6 (n is also equal to the total number of LEDs, since at a distance of 180 mm a mixture of light of all wide directional LEDs takes place).
The optical axis of the led slightly deviates from the optical axis of the matrix (Figure 4).
 |
Figure 4: The optical axises of the LEDs form an angle to the optical axis of the matrix. |
Every radiating element is tilted outward from the central axis of the endoscopic capsule so that the central axis of each light emitting diode is positioned at an angle to the central axis of the matrix. Thus, the light intensity in the central zone, which is normally illuminated by several LEDs, and the periphery, which receives light from only one diode will be about the same.
Reflectors are installed (Figure 5).
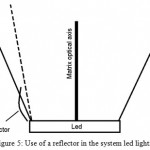 |
Figure 5: Use of a reflector in the system led lighting. |
The uniformity of illumination of the digestive tract can be controlled via reflective elements that allow to “move” some of the light from the central part and to send it to the periphery.
It should be noted that the uneven brightness of the image can be adjusted programmatically. However, any software modification of the image leads to defects and cannot entirely compensate for the phenomenon of light pollution and restore the brightness balance of an image.
Conclusion
Thus, the existing drawbacks in the illumination system and imaging of the wireless endoscopic capsule can be adjusted by hardware or software methods. The solutions described in this article will allow to improve the illumination system of the wireless capsule, increasing the quality of recorded images, which greatly affects the efficiency of the algorithms for the automated detection of gastrointestinal diseases.
In future, we plan to continue to work on improving the illumination system of wireless capsule to ensure uniform and stable lighting of the digestive tract.
Acknowledgement
The publication is based on the results of the work performed by NRNU MEPhI and RTI under contract No. 02.G25.31.0018, dated 12 February 2013 between an Open joint stock company “Radio-Еechnical Institute Named after Academic A. L. Mints” and the Ministry of education and science of the Russian Federation.
References
- Iddan, Gavriel; Meron, Gavriel; Glukhovsky, Arkady; Swain, Paul. Wireless capsule endoscopy. Nature, Volume 405, Issue 6785, pp. 417 (2000).
- Kukushkin Alexander, Mikhaylov Dmitry, Ivanova Ekaterina, FedorovEvgeny, Zhukov Igor, Semenov Sergey, Tolstaya Anastasia, Muleys Rami, Starikovski Andrey. Recognition of Hemorrhage in the Images of Wireless Capsule Endoscopy. The 16th IEEE Mediterranean Electrotechnical Conference MELECON 2012. Pages: 899-902.
- KhabibullinTimur, AnpilogovArtem, ShayakovAskar, Konev Vladimir, LebedevGrigoriy, Tolstaya Anastasia and Shinkarenko Anton. Magnetically based hardware-software complex for wireless endoscope capsule control. Biosciences Biotechnology Research Asia, Volume No. 12 Issue No.: 2, 2015. Pages: 1273-1280.
- Lebedev G.N., Zharikov E.S., Tolstaya A.M., Tolstaya P.M.Choosing a retention method to control the endoscopic capsule by a magnetic field. Biomedical and Pharmacology Journal, Vol. 13(2), 2016. Pages: 1265-1278.
- Zhukov I., Mikhailov D., Konev V., Fedorov, E., Ivanova, E., Khabibullin T. Managed wireless endoscopic capsule for examination of the GIT. Scientific and technical journal “special Equipment and communications” No. 3 may-June 2013, LLC “Special Equipment and Communications”, Moscow 2013. P. 49-53.
- Mikhaylov Dmitry, Zhukov Igor, Konev Vladimir, Starikovskiy Andrey, KhabibullinTimur, Tolstaya Anastasia, Kukushkin Alexander. Review of features and metafeatures allowing recognition of abnormalities in the images of GIT. 17th IEEE Mediterranean Electrotechnical Conference (MELECON), 2014. 13-16 April 2014. Pages: 231 – 235.
- Cerveri, P., Zazzarini, C.C., Patete, P., Baroni, G. A micro-optical system for endoscopy based on mechanical compensation paradigm using miniature piezo-actuation. Medical Engineering and Physics, Volume 36, Issue 6, June 2014, Pages 684-693.
- Goncalves, N., Roxo, D., Barreto, J., Rodrigues, P. Perspective shape from shading for wide-FOV near-lighting endoscopes. Neurocomputing, Volume 150, Issue PA, 20 February 2015, Pages 136-146.
- Lu, M.-K., Chang, F.-C., Wang, W.-Z., Hsieh, C.-C., Kao, F.-J. Compact light-emitting diode lighting ring for video-assisted thoracic surgery. Journal of Biomedical Optics, Volume 19, Issue 10, 1 October 2014.
- Capsule endoscopy in understandable language / de-Franchis R., Lewis B., Mishkin D., translated from English. Ed Fedorov E., IvanovaE.. – M.: Practical medicine, 2012. – 128 p.: ill.
- Development and prospects of video capsule endoscopy. Biobyte, 11 Feb 2012. URL: http://biobyte.ru/razvitie-i-perspektivi-videokapsulnoj-endoskopii.
- OV7690 color CMOS. Datasheet. OmniVision Technologies. 2008. URL: http://zhopper.narod.ru/mobile/ov7690_full.pdf.
- Poddubny B., Malikhova O., Kashin S. Magnifying and narrow-spectrum endoscopy: new opportunities for the diagnosis of pathological processes of esophagus and stomach // NBI in endoscopic diagnosis of diseases of the upper gastrointestinal tract. – M.: LLC “OLYMPUS MOSCOW, 2007. Pp. 10-14.
- Bansal A., Ulusarac O., Mathur S., Sharma P. Corre¬lation between narrow band imaging and nonneoplastic gastric pathology: a pilot feasibility trial // Gastrointest. – 2008. – Vol. 67, N 2. – P. 210–216.
- Gheorghe C. Narrow-band imaging endoscopy for diagnosis of malignant and premalignant gastrointestinal lesions // J. Gastrointest. – 2006. – Vol. 15, N 1. – P. 77–82.
- Lambert R., Kuznetsov K., Rey J.F. Narrow-band imaging in digestive endoscopy // Sci. World J. – 2007. – Vol. 30, N 7. – P. 449–465.
- Roshal L., Bryantsev A., MinaevV.. The use of a semiconductor laser scalpel in laparoscopic surgery of childhood. (Guidelines No. 12). Moscow, 2008.
- Dmitry Mikhaylov, TimurKhabibullin, Igor Zhukov, Andrey Starikovskiy, LandishGubaydulina, Natalya Romanchuk and Vladimir Konev. Development of Retention System of the Autonomous Endoscopic Capsule and Its Functionalities. Proceedings of the International Conference on Biomedical Electronics and Devices. ESEO, Angers, Loire Valley, France. 3 – 6 March, 2014. Pages 77-84.
- Capsule endoscope and a capsule endoscope system. United States Patent Application 20040225189 A1. 2004, URL: http://www.freepatentsonline.com/y2004/0225189.html.
- Pieter van der Zee. Measurement and modeling of the optical properties of human tissue. Thesis submitted for the degree of PhD, 1992.
- Saurer, O.; Koser, K.; Bouguet, J.-Y.; Pollefeys, M. Rolling Shutter Stereo. IEEE International Conference on Computer Vision (ICCV), 2013. Pages: 465 – 472.

This work is licensed under a Creative Commons Attribution 4.0 International License.



